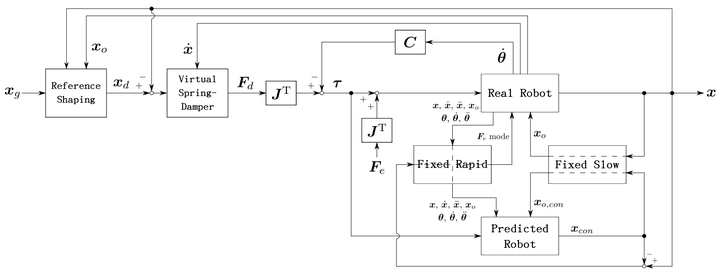
 The Schematic Block Diagram of the Proposed Controller
The Schematic Block Diagram of the Proposed Controller
We improved a nonlinear reference shaping controller for manipulators sharing their workspace with humans. The controller is based on the slow and rapid adaptations, which we tried to enhance. After the progress, the slow adaptation can generate movements with smooth endpoint velocity profiles when target position is changed. The rapid adaptation is upgraded as well with respect to not only significantly large external forces but also slight ones. They make the manipulators capable of behaving compliantly to the external forces, and also resuming the motion after the forces are removed, even when the shifts are small. Force detectors are unnecessary in this control system. The validity of the proposed ideas was confirmed via simulations on a planar 4-DOF manipulator.
Shang-Yi Chuang
ML Researcher | ASR R&D
Extremely self-motivated engineer with excellent understanding of machine learning algorithms. Interested in speech processing, natural language processing, and multimodal learning.